技術仕様
推奨システム構成
下図のようなローカルネットワーク環境を推奨しています。
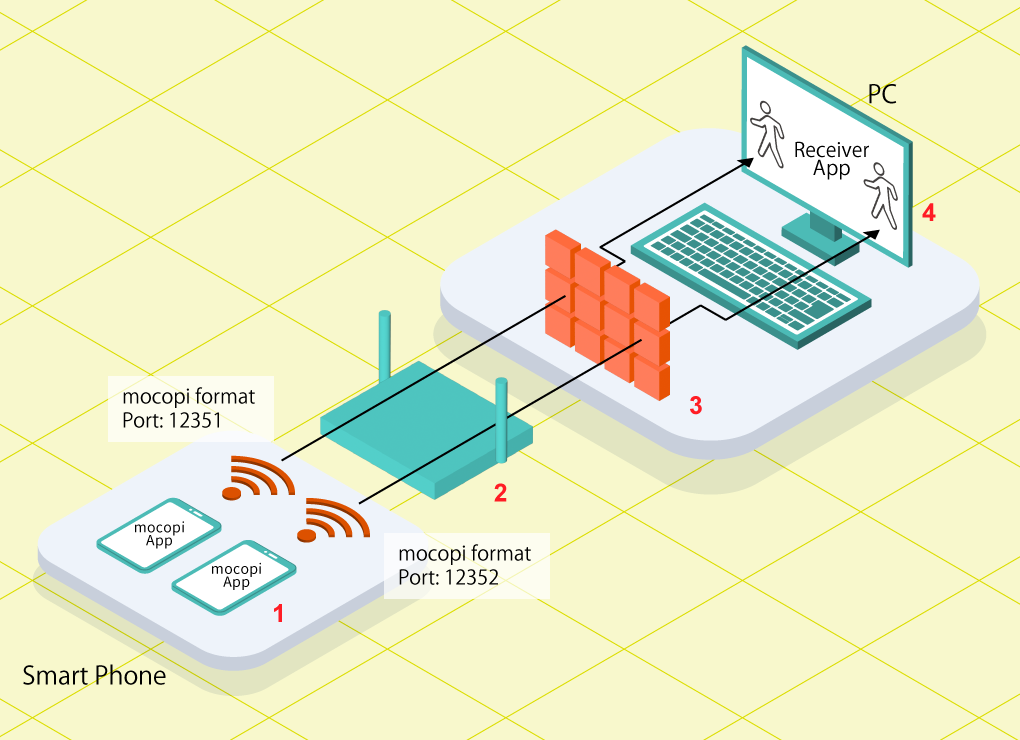
- スマートフォンは、5GHz帯のWiFiに接続します。
- Bluetoothとの干渉を避けるため、無線ルーター/アクセスポイントの2.4GHz帯の停波を推奨します。
- PCのファイアウォール設定で、mocopiアプリのPC接続設定で指定するUDPポート番号(初期値:12351)の受信を許可しておきます。
- 複数アバターのモーションデータを受信する場合は、異なるUDPポート番号を使用します。
ご注意
本製品に搭載、または本製品で利用可能な、ネットワークサービス、コンテンツおよびソフトウェア(オペレーションシステム含む)には、各々の利用条件が適用されます。予告なく提供が中断・終了したり、内容が変更されたり、ご利用に際して別途の登録や料金の支払いが必要になる場合がありますので、ご了承ください。
データ送信方式
| インターネットプロトコル | IPv4 |
|---|---|
| 通信プロトコル | UDP |
| ポート番号 | 任意の未使用ポート(アプリ初期値:12351) |
ご注意
- IPアドレスを指定する際は、必ずIPv4形式で設定してください。“localhost”やIPv6形式は非対応です。
- mocopiは、ローカルネットワークでの使用を前提としています。そのため、モーションデータ送信時の暗号化は行っておりません。インターネット経由でデータを送信した場合、通信内容が傍受され、データが漏洩する可能性があります。
- 作成したアプリケーションの利用者に対して、モーションデータが暗号化されていないことを通知することを推奨します。
参考
複数人のプレイヤーのモーションデータを送受信する場合は、プレイヤーごとに異なるポート番号を指定してください。
スケルトン定義(Bone構造)
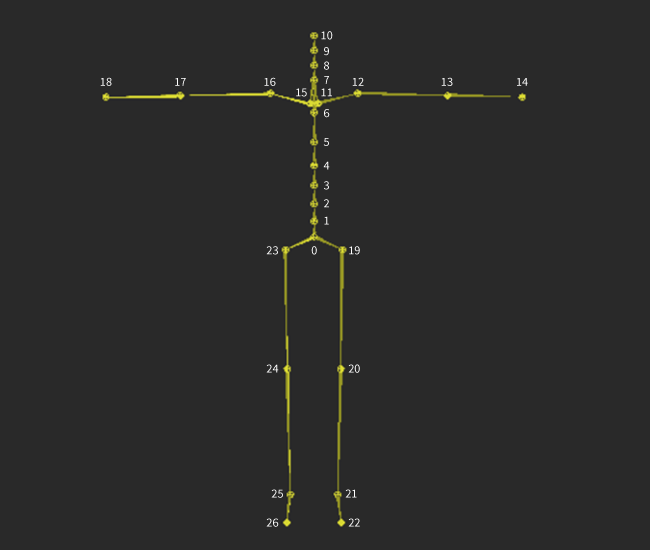
mocopiで定義されているスケルトンのBone構造は以下のとおりです。
| Index | Joint Name | Index | Joint Name |
|---|---|---|---|
| 0 | root | 14 | l_hand |
| 1 | torso_1 | 15 | r_shoulder |
| 2 | torso_2 | 16 | r_up_arm |
| 3 | torso_3 | 17 | r_low_arm |
| 4 | torso_4 | 18 | r_hand |
| 5 | torso_5 | 19 | l_up_leg |
| 6 | torso_6 | 20 | l_low_leg |
| 7 | torso_7 | 21 | l_foot |
| 8 | neck_1 | 22 | l_toes |
| 9 | neck_2 | 23 | r_up_leg |
| 10 | head | 24 | r_low_leg |
| 11 | l_shoulder | 25 | r_foot |
| 12 | l_up_arm | 26 | r_toes |
| 13 | l_low_arm | ||